临近高考,感觉自己找不到学习的感觉,自从攀登计划通过以来一直处于浑浑噩噩的状态中,计算能力也大幅下降了——今天把拉格朗日点的微扰问题拿出来算了一遍,发现自己的能力退化很严重. 于是我决定,在这段时间做一些对以前竞赛中非常难以计算的问题做一些回顾(其实也是经典物理邻域的一些重要的计算),让自己重温之前计算的手感,同时在高考考前保持对学习的热情.
至于“这段时间”持续多久,还是一个需要商讨的问题. 目前我的想法是下周(二模前一周)回学校晚自习,但是还不能确定,不过既然已经开了“计算专题”的头,我应该会坚持下去,至少把笔记本中的难算且有意义的问题都重新算一遍.
这个专题的要求是,尽量地将计算中的所有过程事无巨细地展现出来,以便之后的查阅以及对计算错误的查验.
话不多说,要开始了.
如图所示,取两个较大天体围绕质心的旋转参考系,建立直角坐标系,坐标原点定为两个较大天体的质心,两个较大天体位于x轴上,间距为L.
设转动角速度为Ω=L3G(m1+m2),两星体质量之比为m2/m1=α<1. 求第三个质量极小(不考虑其质量对其他星体的影响)的星体所能平衡的位置(拉格朗日点),以及其受到微扰之后的运动.
首先肯定是计算各个拉格朗日点的位置.
为了得到这个问题的结果,先列出全空间的势能及其一阶、二阶导数.
V(x,y)=−[(x+α+1αL)2+y2]1/2Gm1m−[(x−α+1L)2+y2]1/2Gm2m−21mΩ2(x2+y2)
无量纲化:
V=−[(x+α+1α)2+y2]1/21+α1−[(x−α+11)2+y2]1/21+αα−21(x2+y2)
量纲恢复时只需按比例乘上一些对应物理量即可,之后的运算大多都会是无量纲的.
各阶导数:
∂x∂V=[(x+α+1α)2+y2]3/21+α1(x+α+1α)+[(x−α+11)2+y2]3/21+αα(x−α+11)−x∂y∂V=[(x+α+1α)2+y2]3/21+αy+[(x−α+11)2+y2]3/21+ααy−y∂x2∂2V=[(x+α+1α)2+y2]3/21+α1−[(x+α+1α)2+y2]5/21+α3(x+α+1α)2+[(x−α+11)2+y2]3/21+αα−[(x−α+11)2+y2]5/21+α3α(x−α+11)2−(1+α)=−(1+α)[(x+α+1α)2+y2]5/22(x+α+1α)2−y2−(1+α)[(x−α+11)2+y2]5/22α(x−α+11)2−αy2−1∂y2∂2V=−(1+α)[(x+α+1α)2+y2]5/22y2−(x+α+1α)2−(1+α)[(x−α+11)2+y2]5/22αy2−α(x−α+11)2−1∂x∂y∂2V=∂y∂x∂2V=−(1+α)[(x+α+1α)2+y2]5/23(x+α+1α)y−(1+α)[(x−α+11)2+y2]5/23α(x−α+11)y
至此,准备工作结束.
我们认为α≪1. 在计算x轴上的拉格朗日点时,我们均采用这一近似.
这时y=0,所以∂V/∂y=0,我们只需令∂V/∂x=0即可.
通过观察发现,在x=α+11附近,∂V/∂x存在零点,所以可以取x=α+11+δ,δ≪1进行近似求解.
(1+α)∂x∂V⟹δ=(1+δ)31+δ+δ3αδ−1−(1+α)δ≈1−2δ+δ2α−1−δ=δ2α−3δ=0=(3α)1/3
所以L1点坐标为(1+αL+(3α)1/3L,0)(量纲已恢复).
类似地,可以写出L2(1+αL−(3α)1/3L,0).
我们发现,δ的量级是大于α的量级的,这一点在之后会用到.
同样根据对∂V/∂x这一函数的观察,在x=−1−1+αα附近也存在零点,可以使用与上面一样的手段进行求解. 令x=−1−1+αα−δ,δ≪1.
(1+α)∂x∂V⟹δ=(−1−δ)3−1−δ+(−2−δ)3α(−2−δ)+α+(1+α)+(1+α)δ≈−1+2δ−4α+2α+1+δ=3δ+47α=0=−127α
此时的δ又与α同阶了,这也是需要关注的.
所以L3(−1+ααL−L+127αL,0).
至此,x轴上的拉格朗日点位置已经全部求解完毕,值得注意的是这里的三个解均是近似结果.
令∂V/∂x=∂V/∂y=0. 这时观察下面两式:
[(x+α+1α)2+y2]3/2x+α+1α+[(x−α+11)2+y2]3/2α(x−α+11)−(1+α)x=0[(x+α+1α)2+y2]3/2y+[(x−α+11)2+y2]3/2αy−(1+α)y=0
可以发现两个分母均为 1 时方程组成立,所以得到简化之后的方程组:
(x+α+1α)2+y2=1(x−α+11)2+y2=1
解得x=2(1+α)1−α,y=±23. 这样我们就获得了L4、L5两点的坐标. 可以发现它们与两个大天体分别构成等边三角形.
在分析小星体的运动时,我们需要考虑势能的二阶导数,而二阶导数的形式已经在前面的过程中给出.
对于L1点,有
∂x2∂2V∣L1∂y2∂2V∣L1∂x∂y∂2V∣L1≈−[1+(3α)1/3]32−[(3α)1/3]32α−(1+α)≈−2+6(3α)1/3−6−1=−9+6(3α)1/3≈[1+(3α)1/3]31+[(3α)1/3]3α−(1+α)≈1−3(3α)1/3+3−1=3−3(3α)1/3=∂y∂x∂2V∣L1=0
考虑 Coriolis 力的影响,设在x,y方向上分别偏离无量纲小量ξ,η,则可以列出动力学方程(无量纲化的):
ξ¨η¨=−[−9+6(3α)1/3]ξ+2η˙=−[3−3(3α)1/3]η−2ξ˙
将形如Aeλt形式的解代入上述方程,得到特征根方程(量纲在此时还原):
λ2A1λ2A2⟹=−[−9+6(3α)1/3]Ω2A1+2λΩA2=−[3−3(3α)1/3]Ω2A2−2λΩA1{{λ2+Ω2[−9+6(3α)1/3]}A1+2ΩλA2=0−2ΩλA1+{λ2+Ω2[3−3(3α)1/3]}A2=0
要使常数A1,A2有无穷多组解,则方程组的系数行列式为零.
λ2+Ω2[−9+6(3α)1/3]2Ωλ−2Ωλλ2+Ω2[3−3(3α)1/3]=0⟹λ4+Ω2[−2+3(3α)1/3]λ2+Ω4[−27+45(3α)1/3]=0λ1,22≈2Ω2{2−3(3α)1/3±4−12(3α)1/3+108−180(3α)1/3}=Ω2{1−23(3α)1/3±27⋅1−712(3α)1/3}≈Ω2[1±27−1421±247(3α)1/3]
这时我们便得到了L1点附近微扰运动的特征根. 这里λ的实部表征衰减或发散运动,虚部表征稳定的震动,而两个解意味着两种不同的运动模式.
类似地,可以得到L2点附近微扰运动的特征根:
λ1,22≈Ω2[1±27+1421±247(3α)1/3]
开算:
∂x2∂2V∣L3∂y2∂2V∣L3∂x∂y∂2V∣L3≈(1−α)[−∣(−1+127α)32∣−∣(−2+127α)32α∣−1−α]≈(1−α)[−(2+27α)−4α−1−α]≈−3−419α+3α=−3−47α≈(1−α)[∣(−1+127α)31∣+∣(−2+127α)3α∣−1−α]≈(1−α)[1+47α+8α−1−α]≈87α=∂y∂x∂2V∣L3=0
(在上面的计算过程中,我深刻地认识到了“符号”的重要性. 同时,之前一直几乎被我们忽略的1+α1这一因子在L3点附近微扰运动的求解中起到了关键性的作用,这是因为在这里微扰产生的势能二阶导数是O(α)一阶的量.)
同样会有
λ2+Ω2(−3−47α)2Ωλ−2Ωλλ2+Ω2⋅87α=0⟹λ4+Ω2(1−87α)λ2−Ω4⋅821α=0λ1,22≈2Ω2[−1+87α±1−47α+221α]≈Ω2[−21+167α±21(1+835α)]=Ω2(−21±21+167±35α)
所以L3点处的稳定成分λ12=Ω2(−1−47α),不稳定成分λ22=Ω2⋅821α.
注意到这时近似已经取消了. 我们的计算得出
∂x2∂2V∣L4∂y2∂2V∣L4∂x∂y∂2V∣L4=y2−1−1+α2(x+α+1α)2−1+α2α(x−α+11)2=43−1−1+α2⋅41−1+α2α⋅41=−43=1+α1(x+α+1α)2+1+αα(x−α+11)2−2y2−1=41−2⋅43−1=−49=∂y∂x∂2V∣L4=−1+α1(3⋅21⋅23−3α⋅21⋅23)=−433⋅α+1α−1
所以有
λ2−43Ω22Ωλ+433⋅α+1α−1⋅Ω2−2Ωλ+433⋅α+1α−1⋅Ω2λ2−49Ω2=0⟹λ4+Ω2λ2+Ω4[1627−1627(α+1α−1)2]=0λ1,22=2Ω2[−1±−423+427(α+1α−1)2]
即得到运动状态. 要稳定,必须有上述方程的Δ>0,方程两个解均表征衰减运动,此时α∈(0,225−621)∪(225+621,+∞).
L5点显然与之相同.
先简介引潮力:对于二体引力系统(相互绕转的旋转参考系中),质点m的平衡位置为r0,则若在x,y,z方向上分别微扰ξ,η,ζ,则在三个方向上有力
Fx=r032GMm⋅ξ,Fy=−r03GMm⋅η,Fz=−r03GMm⋅ζ
从三者的系数来看,可以发现是符合拉普拉斯方程的.
用这个方法来重新计算L1点,L2点和L3点有关的问题(因为L4点和L5点的计算是比较严格的,也没必要用这种方法来尝试).
L1点和L2点是对称的,有
FxFy=21+α1Ω2ξ+21+ααΩ23α1ξ+Ω2ξ≈9Ω2ξ=(−Ω2−3Ω2+Ω2)η=−3Ω2η
计入 Coriolis 力,得到
{ξ¨=9Ω2ξ+2Ωη˙η¨=−3Ω2η−2Ω2ξ˙⟹λ2−9Ω22Ωλ−2Ωλλ2+3Ω2=0
这样的出来的结果是λ1,22=(1±27)Ω2,比原来的方法多近似了一阶.
对于L3点,则有
FxFy=21+α1Ω2ξ+21+ααΩ2231ξ+Ω2ξ≈3Ω2ξ=−1+α1Ω2(1−127α)31η−1+ααΩ2231+Ω2η≈−87αΩ2η
⟹{ξ¨=3Ω2ξ+2Ωη˙η¨=−87α−2Ωξ˙⟹λ2−3Ω22Ωλ−2Ωλλ2+87αΩ2=0
最后解得λ12=(−1−47α)Ω2,λ22=821αΩ2. 这个结果和之前一样.
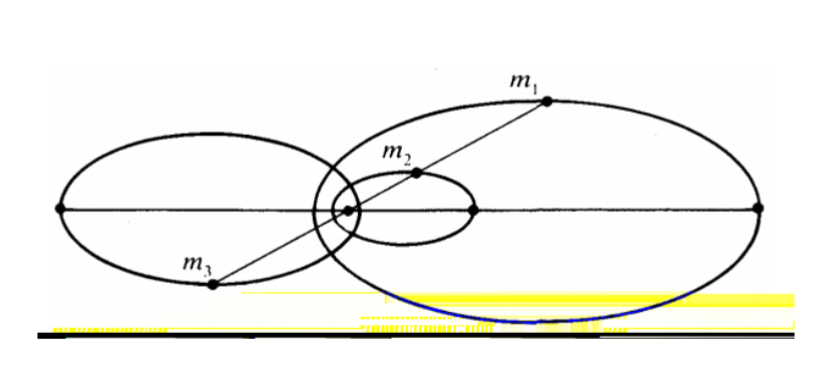
我们算出来的拉格朗日点是全部的拉格朗日点吗?有更多点吗?这是我之前就在思考的问题. 借助 GeoGebra,我画出了x轴上的V分布情况,并借此来做出自己的一些分析.
如图所示,采用的数据是α=0.01. 显然这个函数是只有 3 个极值点的,且均不稳定,我们算出来的所谓稳定运动成分是考虑了 Coriolis 力的结果.
事实上,L4点和L5点的定性性质也可以通过作图看出,但是限于技术条件就先作罢.
首先我是深刻体悟到了自己水平的下降. 之前算这种规模的模型顶多一个下午,而且犯过一次的错误(开平方根的正负号问题)不会再犯一次;现在则是用了两个晚上,出错率也很高. 这些技能还是常练常新,自我精进的道路还很遥远. 但是收获也还是有的,因为“必将活用于下一次”!
然后在计算的过程中也回想起之前在竞赛组里的很多时光. 当时算拉格朗日点至少算过三遍,组内每个人都在这个问题上花过不少时间,也是当时组内的周刊比较出色的几篇合作文章之一的选题,现在回想起那些面红耳赤讨论的景象真是感慨万千……
这个专题还会继续下去,可能下一次是算平行主光轴光线的像散(这才是真正的噩梦啊)之类的问题. 希望自己能继续通过这种方式得到收获,实现进步.
以上.
谢给我发来 PKU 2022 年力学免修考试的一个题目,是与我在上面分析的问题有关的,现在来就此题扩充一些上面的内容.
1.显然这个问题是具有轮换对称性的,所以只需要取s1来进行示例性的计算.
s1¨=x3¨−x2¨=−G[∣x3−x1∣3m1(x3−x1)+∣x3−x2∣3m2(x3−x2)]+G[∣x2−x1∣3m1(x2−x1)+∣x2−x3∣3m3(x2−x3)]=Gm1∣s2∣3s2−Gm2∣s1∣3s1+Gm1∣s3∣3s3−Gm3∣s1∣3s1=Gm1(∣s1∣3s1+∣s2∣3s2+∣s3∣3s3)−G∣s1∣3s1(m1+m2+m3)=−Gm∣s1∣3s1+Gm1
轮换对称性决定了:
si=−Gm∣si∣3si+miG
Q.E.D□
2.在题目所述的情况中,有∣s1∣=∣s2∣=∣s3∣=s,G=0. 所以上面公式简化为
si=−Gm∣si∣3si
这时就可以写出关于xi的方程了. 需要注意的是,三个动力学方程中,一定有一个是不独立的,所以这里只写出两个.
x3¨−x2¨=−s3Gmx3+s3Gmx2x2¨−x1¨=−s3Gmx2+s3Gmx1
但是未知数一共有x1¨,x2¨,x3¨三个,方程的数量不够. 这时只能想到质心本身所包含的方程:
m1x1+m2x2+m3x3=0
利用第三个方程消去x1(x1¨),有
x3¨−x2¨x2¨−x1¨⟺(1+m1m2)x2¨=−s3Gmx3+s3Gmx2=x2¨−m1−m2x2¨−m3x3¨=−s3Gmx2+s3Gmm1−m2x2−m3x3+m1m3x3¨=−s3Gm(1+m1m2)x2−s3Gmm1m3x3
消去x3¨得到:
x2¨=−s3Gmx2
于是又根据轮换性,得到了
xi¨=−∣xi∣3GMixi
其中,Mi=m∣xi∣3/s3 ,这是一个定值,可以通过建系的方法计算出其值.
3.这种情况下,有
s1¨=−(λ+1)s3¨⟹Gm(λ+1)21∣s3∣3s3+m1G=(λ+1)Gm∣s3∣3s3−(λ+1)m3Gs2¨=λs3¨⟹−Gmλ21∣s3∣3s3+m2G=−λGm∣s3∣3s3+λm3G
(其实只需要第一个式子就已经够了)
对第一个式子移项并整理成可以对比系数的形式,这时一定要注意正负号.
Gm∣s3∣3s3[(λ+1)−(λ+1)21]=Gm∣s3∣s3mm1+(λ+1)m3[−(λ+1)21+λ21+1]
对比系数可以发现:
λ+1−(λ+1)21⟹λ3(λ+1)2⟹λ5+2λ4+λ3=−mm1+(λ+1)m3[−(λ+1)21+λ21+1]=mm2λ2−mm3λ3−mm2λ2(λ+1)2+mm3λ3(λ+1)2+mm1(λ+1)2+mm3(λ+1)3=mm2λ2−mm3λ3−mm2λ4−mm2⋅2λ3−mm2λ2+mm3λ5+mm3⋅2λ4+mm3λ3+mm1λ2+mm1⋅2λ+mm1+mm3λ3+mm3⋅3λ2+mm3⋅3λ+mm3
最后整理得到:
(m1+m2)λ5+(2m1+3m2)λ4+(m1+3m2)λ3+(−m1−3m3)λ2+(−2m1−3m3)λ+(−m1−m3)=0
这是最后计算出来的结果,但是并不确定是否是正确的,所以接下来我们用L1点、L2点与L3点的数据进行计算,验证所得的多项式.
对于L1点,沿用之前计算坐标时使用的坐标系,有以下数据:
x1=−1+αα,x2=1+α1,x3=1+α1+(3α)1/3⟹s3=−x1+x2=1,s2=−x3+x1=−1−(3α)1/3⟹λ=s3s2=−1−(3α)1/3
考虑近似m3≪m2≪m1,在多项式中忽略m3,将m2写为α,m1写为1. 得到:
(1+α)(−1−(3α)1/3)5+(2+3α)(−1−(3α)1/3)4+(1+3α)(−1−(3α)1/3)3−(−1−(3α)1/3)2−2(−1−(3α)1/3)−1=0⟺−(1+5(3α)1/3)+2(1+4(3α)1/3)−(1+3(3α)1/3)−(1+2(3α)1/3)+2+2(3α)1/3−1=0⟺(−1+2−1−1+2−1)+(−5+2×4−3−2+2)(3α)1/3=0⟺0=0
这说明对于L1点而言,这个多项式在O(α1/3)阶下是正确的.
对于L2点,是与L1点对称的,所以L1点处多项式成立即意味着L2点亦成立.
接下来计算L3点. 这时有:
x1=−1+αα,x2=1+α1,x3=−1+αα−1+127α⟹s3=x2−x1=1,s2=x1−x3=1−127α⟹λ=s3s2=1−127α
带入到多项式中,注意这一次只能近似到O(α)阶项.
(1+α)(1−127α)5+(2+3α)(1−127α)4+(1+3α)(1−127α)3−(1−127α)2−2(1−127α)−1=0⟺1+α−1235α+2+3α−314α+1+3α−47α−1+67α−2+67α−1=0⟺(1+2+1−1−2−1)+(1−1235+3−314+3−47+67+67)α=0⟺0=0
因此多项式对于L3点在最低阶近似下仍然正确. 所以我们的答案经过了验证,是正确的答案.
至此,题目就已经做完了,可以从中看出拉格朗日点,或者说是限制性三体问题的一些更一般的性质.