
外观
Lesson 8 Nonparametric Statistics
提示
Quizzes
给定信息 ,数据 ,模型 和参数 ,那么
先验 (prior):
似然 (likelihood):
后验 (posterior):
证据 (evidence):
可以用 marginalization 来计算.
Bayes 定理:
什么是 Monte-Carlo?
均匀地随机采点,然后采完之后做平均.
什么是 Important Sampling?
因为有些点的 likelihood 很低,所以可以没有必要过多地采样这些点,相当于在 Monte-Carlo 上面加一个分布函数去采样,我们希望这个分布函数和我们的后验尽可能一样.
如果我们在做 MC 采样时,增加了 100 倍数据量,那么误差应该?
有一个常见的关系,.
对于 MCMC 算法,下面哪一个正确?
- 每个点取决于上一个点.
- ……
一个陷阱是,MCMC 不能直接得到证据,同时,MCMC 并不会最终收敛到一个点.
MCMC 的 issues?
Incomplete burn-in
Burn-in 时间太短会造成 bias.
High auto-correlation
点与点之间关联太强,那么就会造成大量的浪费.
Too wide & too narrow
可能会跑得太远造成浪费,也有可能被 trap.
HMC?
……
nested sampling (V.S MCMC)
- 更准确
- 内置的模型选择
- 副产品是 evidence
- 可以不需要调参数
- 对于多峰的分布更加 robust
- 需要 gradient information
选择 b, c, e.
不选择 a,是因为准确度取决于不同的实际问题.
这节课要开始讲应用了.
Nonparametric Statistics (非参数统计):我们探索未知的理论时,并不知道特别好的函数形式,所以现在需要一个 flexible 的模型来描述可能的函数形式;同时,要充分利用好先验的作用,因为这时我们的知识非常少;另外,为了表达我们的未知模型 (足够 flexible),需要大量的参数,这和 Occam's Razor 是违背的,因此还需要一个方式来描述我们的复杂程度.
Model Forms and Representations
「Fit what you know, soften what you do not know.」
已经有 和 ,确定最后的 .
第一种情况是我们已经非常了解 ,这就是一个测电阻的实验,我们的操作是把估计函数变成了估计确定形式的函数的一个参数;第二种情况是我们大概知道是哪一些函数,那么我们就可以按照上节课的方法,每个模型都试一次,最后计算后验比;第三种情况是最困难的,完全不知道任何函数形式,这一点我们后面会讲到.
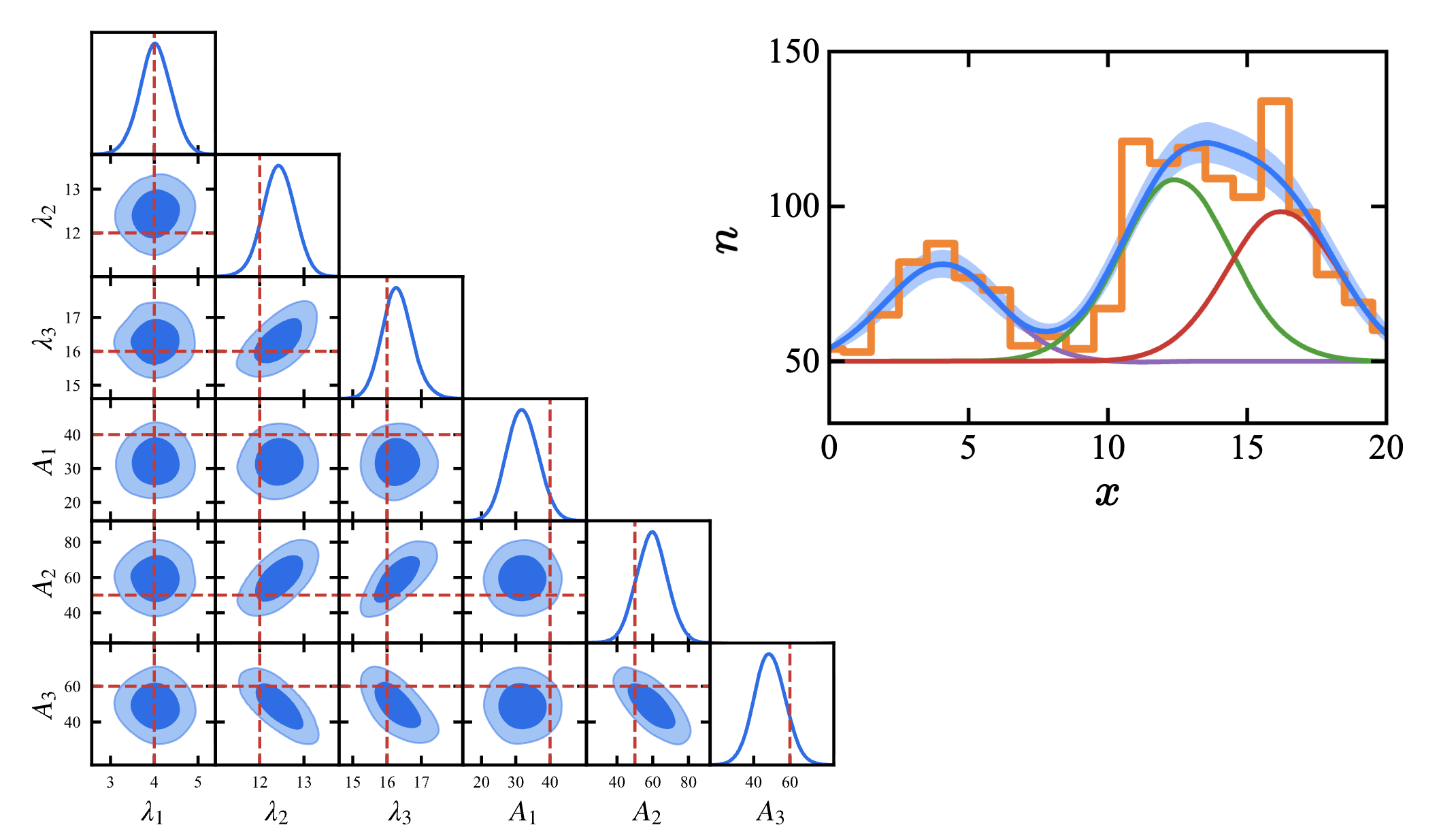
现在我们假设某一次测量得到的光谱上有一系列非常 sharp 的发射线,
考虑像素的影响 () 和 Gauss 型的一个点扩散函数 (point-spread function, PSF),宽度为 ,现在的谱线变成了一个不光滑的形式.
总的似然为
这节课我们已经不能再忽略分母了.
Case 1
我们知道一定只有三条谱线,
这里也显式写出了分母. 同时因为我们对这些数据的了解程度比较多、数据量比较大,取什么先验并不重要,所以最简单地,直接取 .
from scipy.special import gammaln, xlogy
def prior_transform(cube, ranges):
"""Transform unit cube to physical parameters for UltraNest"""
params = np.empty_like(cube)
for i, (pmin, pmax) in enumerate(ranges):
params[i] = pmin + (pmax - pmin) * cube[i]
return params
def log_likelihood(params):
"""Log-likelihood function for spectrum data (x,spec)"""
if params[1] < params[0] or params[2] < params[1]:
return -1e99 * params[:3].sum() # enforce lam1 <= lam2 <= lam3
mu = spec_model(x, lam=params[:3], A=params[3:], B=50, w=2)
loglike = xlogy(spec, mu) - mu - gammaln(spec + 1)
return loglike.sum()这段代码的目的是,去掉三个谱线的对称性,也就是要求三个谱线存在 的关系,如果不满足这样的关系,就返回一个 -1e99 的极小似然,建立一堵「墙」;同时还要给一个小的常数,产生一个「斜坡」,让 Markov chain 知道怎么跑回来.
另外介绍一个 code trick,在很久以前跑过的 nest 算法之后,想要重新读出来要使用 read_file 函数,这个函数没有很好的文档,所以必须要提一下:
from ultranest.integrator import read_file
from getdist import plots, MCSamples
# Load UltraNest results (same as that returned by sampler.run())
_, results = read_file(log_dir, x_dim=len(param_names))
ws = results['weighted_samples']
# Create (weighted) getdist MCSamples object with hard prior ranges
mcsample = MCSamples(samples=ws['points'], weights=ws['weights'],
loglikes=-ws['logl'], names=param_names, labels=param_labels,
ranges={n:p for n,p in zip(param_names, param_ranges)},
sampler='nested')
# Make the posterior triangle plot
g = plots.get_single_plotter()
g.triangle_plot(mcsample, filled=True)如果不用 slides 上面的代码,最后得到的图片一定会有问题. 按照上面那些代码可以得到这样的图片:(蓝色是最终拟合,直方图是数据,其他是 MAP 给出的谱线位置,蓝色线的阴影是我们得到的每个点的标准差)
Case 2
现在我们要做模型选择,
我们现在甚至不知道到底有几条谱线.
所以尝试跑 2 条谱线的模型、4 条谱线的模型,最终得到下面的结果:
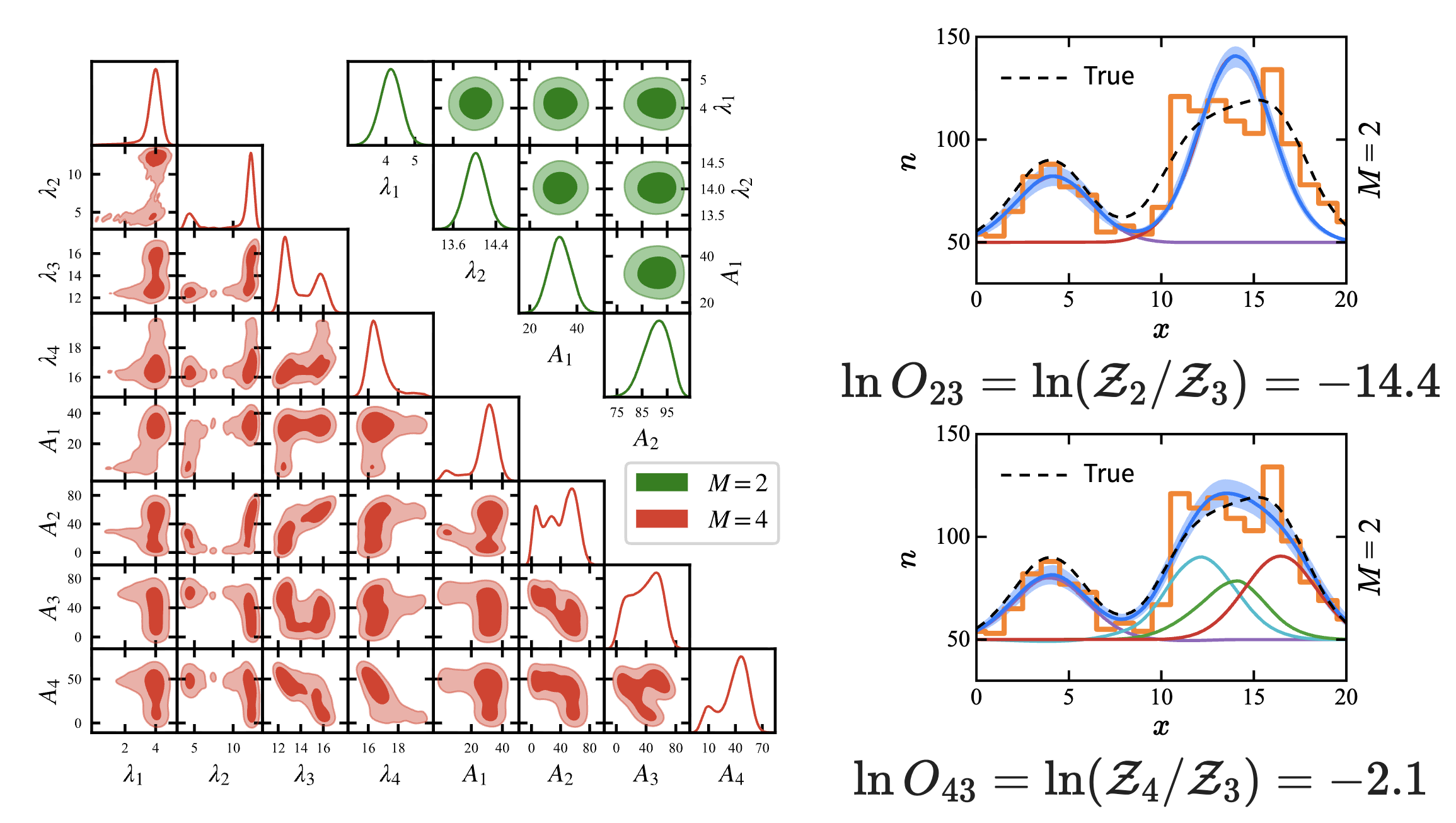
后验比:,. 根据经验,后验比绝对值超过 就可以给出决定性结果,这里可以排除掉 2 条谱线的模型;4 条谱线的模型被 Occam's Razor 所抛弃,最后的结果还是和 case 1 一致.
Case 3
现在我们什么都不知道了. 为了减少所用的参数到可数的范围,我们只能取一些弱假设 (不改变问题的性质的那些假设).
没有参数化的模型,所以一个最简单的想法是,给每一个像素点都找一个值. 但是这样会产生巨量的参数.
更加折衷的方案是,考虑基函数展开:
对于这个问题,我们知道谱线是点扩散函数,所以拿 Gauss 分布作为基函数展开;在数据中的 21 个区间内,取 11 个中心值,用 11 个参数进行拟合,结果如图:
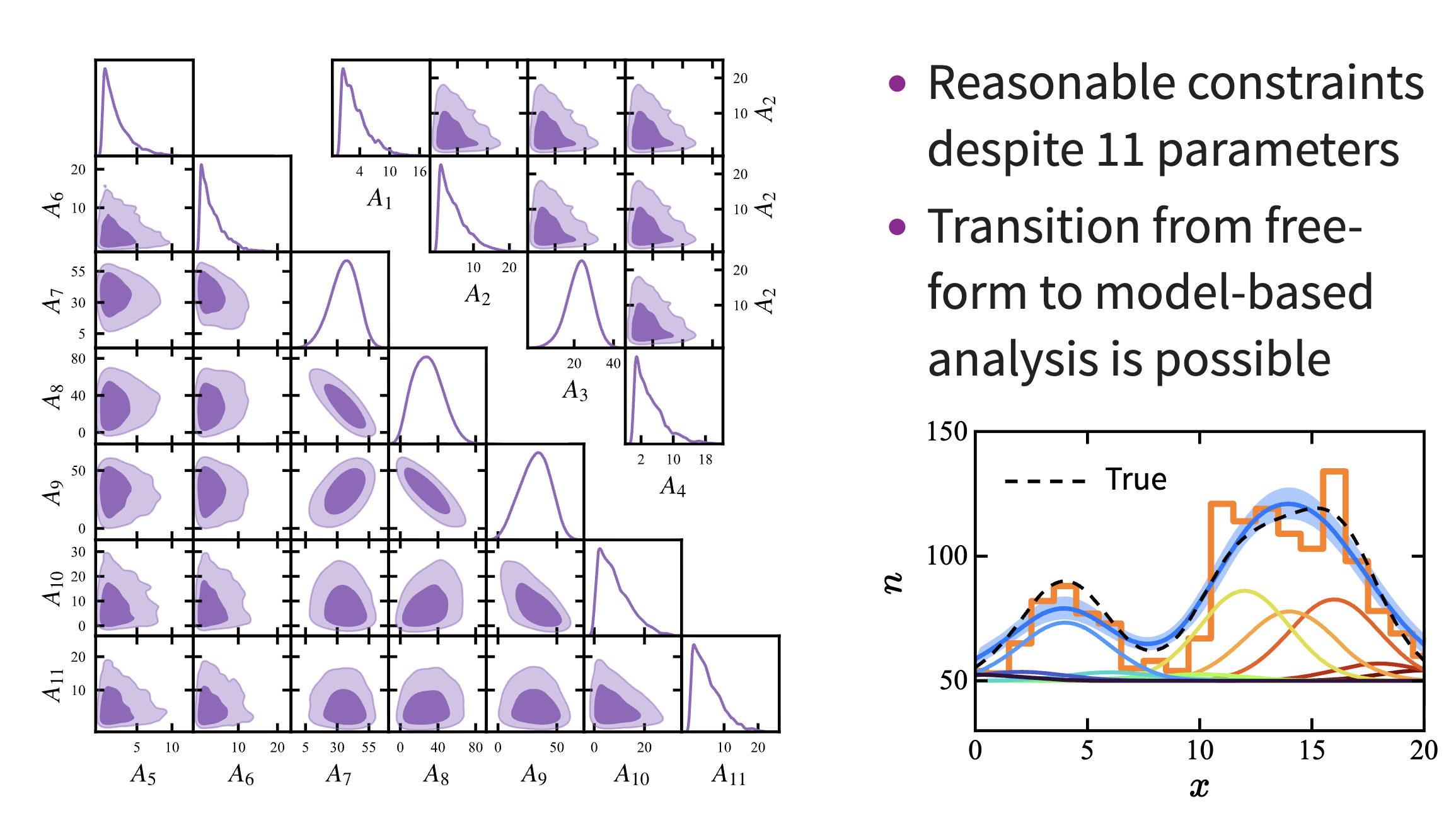
可以看到图中占据主导作用的只有 2 - 4 个峰,这说明我们已经找到了一个不错的函数形式,下一步该缩减参数了,于是我们下一步合理的操作就是缩减这 11 个参数,用 2 - 4 个参数来拟合,接近正确答案.
Gaussian Process Regression
除了直接做参数的先验,我们应该还有其他方法. 下面进入早期机器学习的领域.
我们现在不做参数的先验,而是做函数的先验:
输入的参数 被 Gauss 分布所产生:
Gauss 分布是常见的,所以这个方法并不仅仅适用于 Gauss 型的分布.
核函数 (kernel function):,with hyperparameters .
常取的一个核函数是 Radial basis function (RBF),类似 Gauss 分布
还有周期性的
或者线性的. 这些核函数描述的是每两个坐标上的函数值关联大小,直观来看,一个点和自身的关联是 ,越往远处走,关联性就会出现变化,可能是越来越小,也可能存在周期性. 用一个核函数 (2 个参数 ),可以确定一族函数.
用一组训练集 来优化超参数:
证据:
这是在函数空间里面的一个积分.
从训练集中,我们学会:
即得到一个联合分布.
最后得到一个「函数的概率云」,函数可以在范围内自由变动;但是一旦给定一个点的函数值,在这一点的函数就会「坍缩」.
下面的代码是我们课程第一次使用机器学习的工具包:
from sklearn.gaussian_process import GaussianProcessRegressor
from sklearn.gaussian_process.kernels import RBF
lambdas = [4, 12, 16]
As = [40, 50, 60]
x, spec = sim_spec(lambdas, As, B=50, w=2)
spec_var = spec # Poisson variance
kernel = 1 * RBF(length_scale=1, length_scale_bounds=(0.1,10))
GP = GaussianProcessRegressor(kernel=kernel, alpha=spec_var,
n_restarts_optimizer=9)
GP.fit(x.reshape(-1,1), spec.reshape(-1,1))
# Generate the credible intervals
x_sp = np.linspace(0, 20, 1000).reshape(-1,1)
mean, std = GP.predict(x_sp, return_std=True)得到的结果:
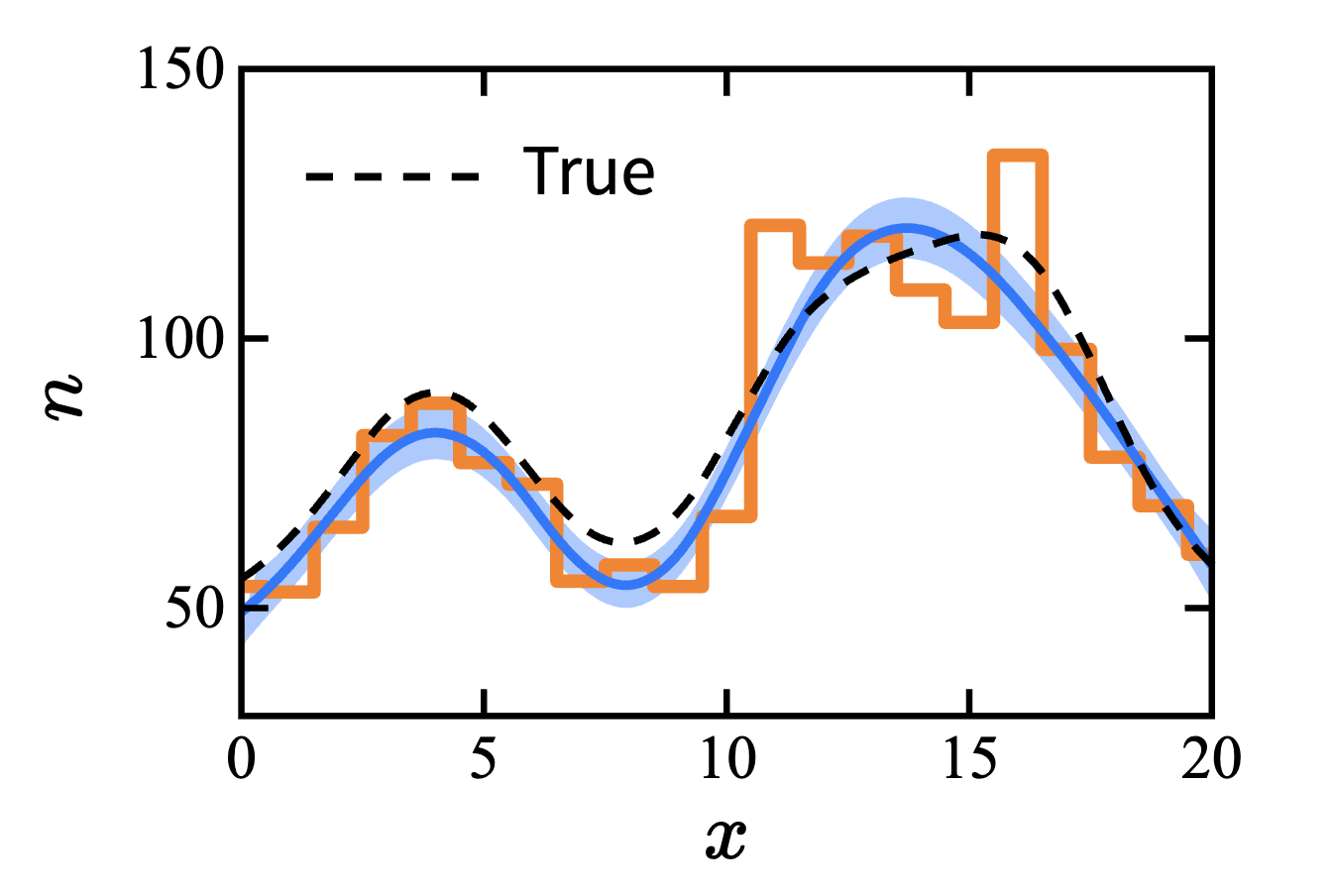
我们的假设只有:函数是平滑的,而且在一定范围里面,基函数是 Gauss 的. 这已经能够得到足够好的结果 —— 函数在每一点的值可以被较为准确地写出. 当然如果想要得到「有几条谱线」的答案,已经可以化为 Case 2 来做.
Maximum Entropy Principle
回到我们课程最开始的问题:统计如何表达我们的无知?也就是,Gauss 分布究竟在什么程度上表达了我们是无知的?为什么我们一开始要采用 Gauss 分布?
一个好的分布函数的前提是:
- 连续性
- 单调性,更大的概率表征更不确定
- 不变性,不同问题得出相同结果
满足这些条件的最佳函数是
这正是熵,Shannon 的信息熵.
我们知道在最无知的情况下,. 更深层次的原因是,要求信息熵的最大值,做 Lagrange 乘子法得到的就是等概率原理. 因此我们可以说,最大熵原理是更基本的一条原理. 如果进一步地,我已经知道了
也就是在变分时再加入两个 Lagrange 乘子. 最后我们得到了 Gauss 分布:
Exercise
- Given the simulated light curve, predict the brightnesses of the star at along with the uncertainties
- Try Gaussian process regression [online example] with an appropriate kernel
- If time permits, try also predictions via parameter inference (assume the model is known)
更新日志
2025/11/6 16:14
查看所有更新日志
1d3c9-于